PID para Seguidor de Linha
Sexta-feira, 17 de março de 2023
Última modificação: Sexta-feira, 17 de março de 2023
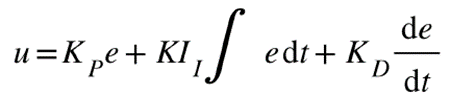
O controlador PID (Proporcional Integrativo Derivativo) é uma técnica de controle de processos onde se ajusta o erro baseado na diferença entre uma grandeza desejada e uma grandeza medida, ela utiliza três constantes KP, KI e KD que são, respectivamente, a constante proporcional, a constante integral e a constante derivativa.
Apesar de existirem esses três termos, o controlador não necessariamente funciona com a presença dos três, sendo possível utilizar apenas o ganho proporcional (Controlador P), o ganho proporcional junto com o integral (Controlador PI) e o ganho proporcional junto com o ganho derivativo (Controlador PD).
A utilização desta técnica é muito difundida devido ao seu baixo custo de implementação e sua capacidade de utilização em uma ampla variedade de sistemas.
A Equipe AIROM está utilizando da técnica PID para ajustar o seu robô “bombeiro” na fase de seguidor de linha.
A seguir é apresentado o vídeo da simulação na plataforma OPEN-ROBERTA na qual os estudos foram realizados.
Para o coordenador da Equipe AIROM, prof. Paulo Henrique C. Pereira, “uma das grandes vantagens dos estudo de robótica é a interdisciplinaridade. No vídeo pode se notar a utilização de lógica de programação, da teoria de controle de processos e da construção de um roover. Tal interdisciplinaridade promove um grande apresentado lúdico para os discentes.”
Prof. Paulo Henrique / DMCVG